Squirmy medicine: Will robot worms heal what ails you?
‘Soft robots may one day worm their way through the human body to assist with the diagnoses of illness and the delivery of medicines.’
Some people look at worms and see fish bait.
Sohum Kapadia sees the future.
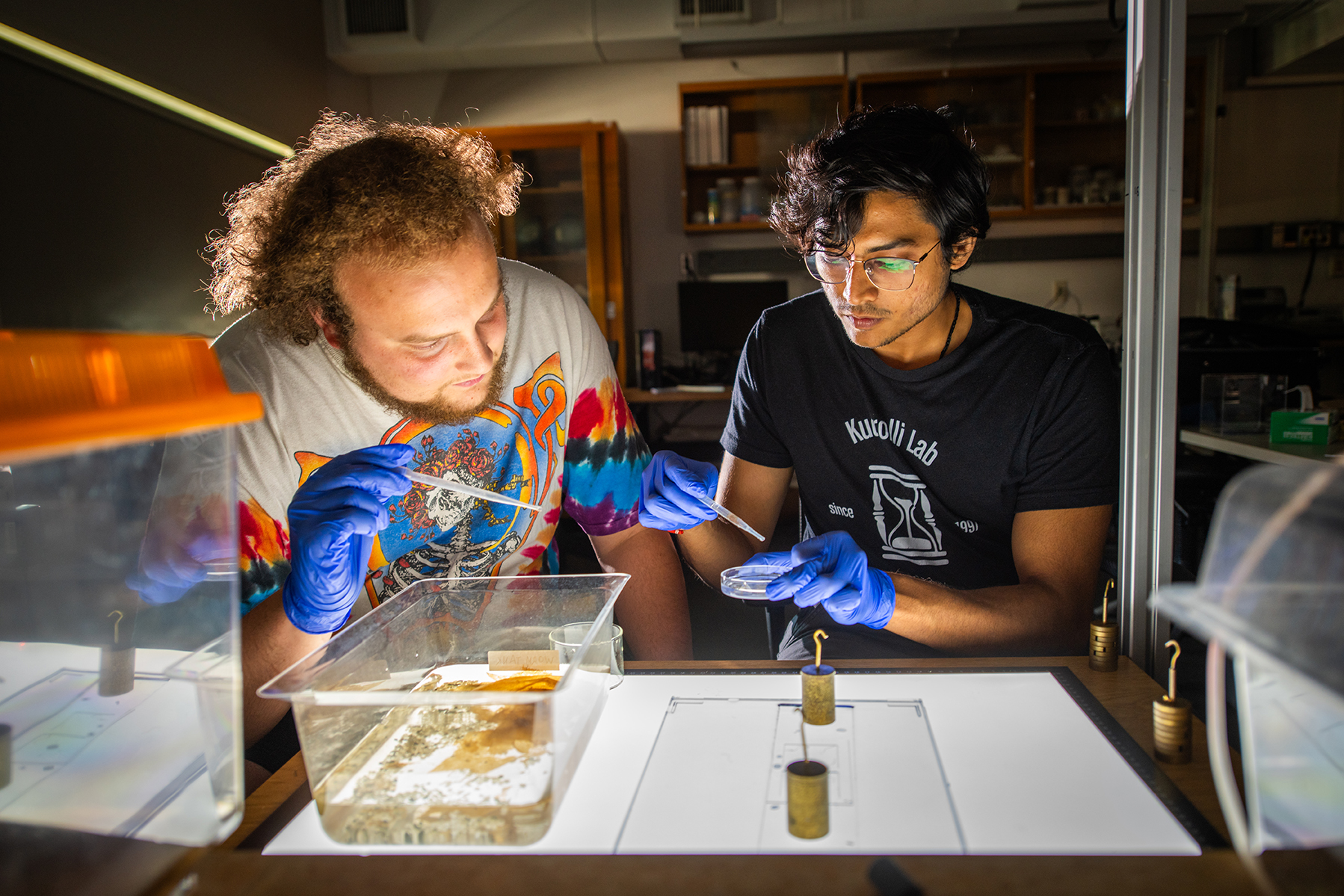
Working in the laboratory of Arshad Kudrolli, professor and chair of the Physics Department, the Ph.D. candidate conducts experiments detailing how California blackworms (Lumbriculus variegatus) move through water-filled spaces of various shapes and strictures.
The research is expected to one day inform the development of “soft robots” that could worm their way through digestive tracts and other complex “terrains” within the human body. They might assist with the diagnoses of illness, the delivery of medicines and other treatments, and the development of more efficient surgical techniques.
“We are trying to understand the mechanisms,” says Kapadia, who has presented his work at the American Physical Society. “This is very root-level research, but the robotics are the ultimate goal.”
Student researcher Simon Bissitt ’26 describes the worms he and Kapadia observe wriggling inside various containers as “inspiration models” for those future robots.

Observing the biolocomotion patterns of worms is central to Kudrolli’s research, which lies at the nexus of biology, physics, and technology. With a core of student researchers, “We are trying to understand how organisms and robots move through media which are not quite liquid or solid,” Kudrolli said when the experimentation began several years ago. In his lab, conditions are created to approximate sand and water, clay, sludge, and even fluids in the human body, which he describes as “a giant hydrogel.”
The most recent round of experiments, led by Kapadia, entails the movements of worms through water to observe the creatures’ behavior when they are met with an obstruction to their forward progress, such as a 90-degree corner in a square tank. Kapadia and Bissitt have been observing the mechanics both of individual worms and groups of worms as they respond to an array of conditions.
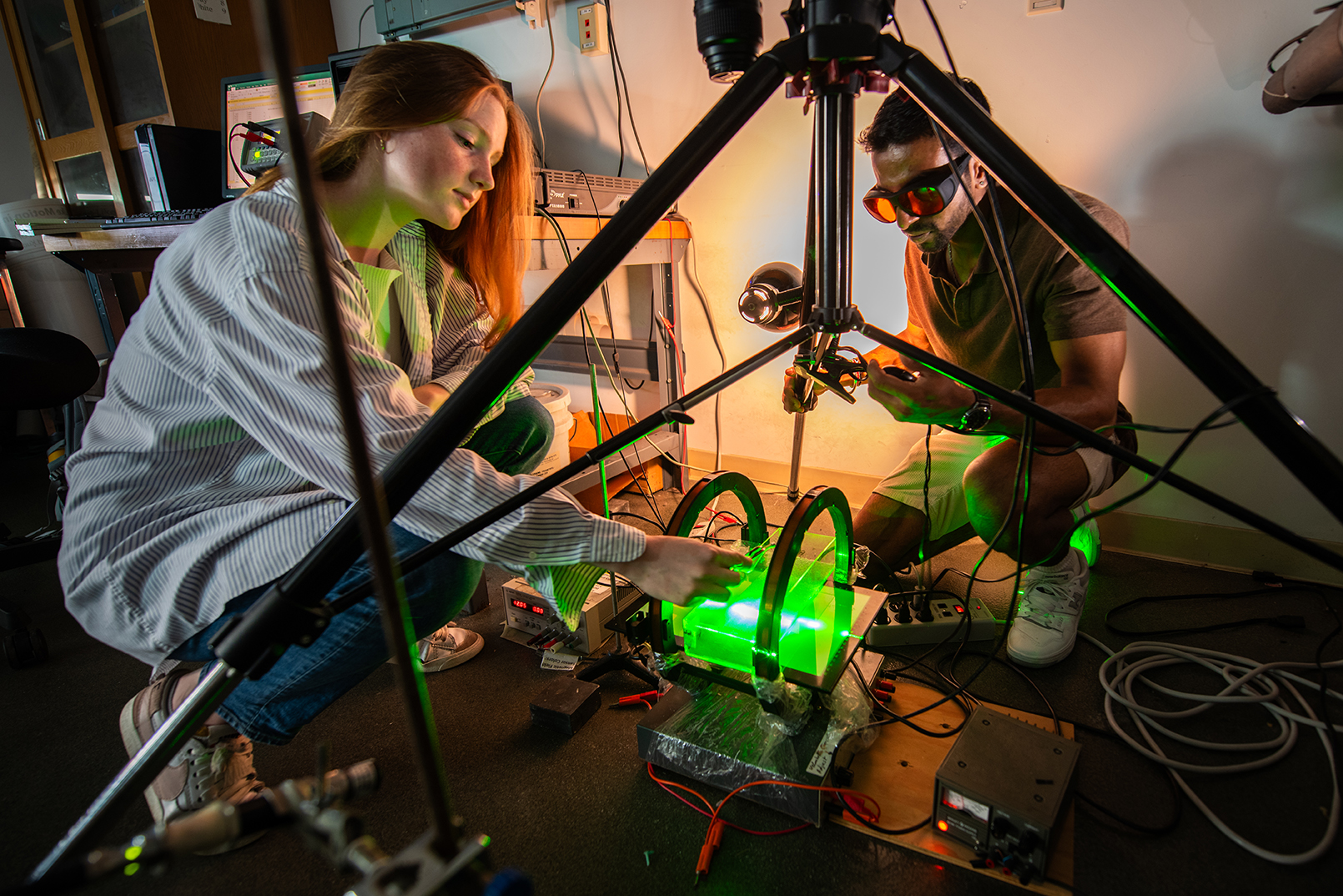
Also in Kudrolli’s lab, senior Lily Carey is experimenting with magneto-elastic robots, which are made to emulate the worm-movement patterns. An oscillating magnetic field generated by a Helmholtz coil — a device that creates a nearly uniform magnetic field — allows the robots to burrow, swim, or crawl through polystyrene beads. The students record the variables that contribute to the worms’ forward propulsion.
Kudrolli recently received a $330,000 grant from the National Science Foundation for the development of soft robots that could one day revolutionize the ways that emerging technologies influence biomedical science.
“The development of soft robots that can navigate through complex terrains to mine resources, and actuated devices that transport granular medium, requires a physical understanding of the interactions of oscillating thin elastic bodies with particulates immersed in a fluid,” Kudrolli explains in his NSF proposal.
“A set of prototypes will be constructed with elastic materials embedded with magnetic particles that can be oscillated with controlled external fields and can be observed inside opaque medium … [T]he elastic forces of the body, and the external fields will be developed guided by experimental observations of the shape and velocity of the robots.”
The work will “result in a deep understanding of biolocomotion and soft robot design in sediment beds” and perhaps, someday, within the landscape of the human body.
The project will enable the year-round research training of undergraduate students through intensive participation in summer research, and capstone courses towards pursuing STEM careers.
A community-education component is also connected to the NSF grant: Clark undergraduate and graduate students in Kudrolli’s lab will participate in activities — creating educational toys that explore the physics of burrowers — to expand K-12 students’ and even adults’ knowledge and appreciation of this forward-thinking research.


Copyright © 2024 Clark University
Public Information
|
Privacy Policy
|
Website Accessibility
|
Nondiscrimination Policy